Калуга
Areatek RP Laser Sensor XL











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Стоимость
По запросу
Запросить предложение
Заказать бесплатную демонстрацию
 Официальные дилеры
Официальные дилеры Собственная сервисная служба
Собственная сервисная служба Поставки по России и СНГ
Поставки по России и СНГ
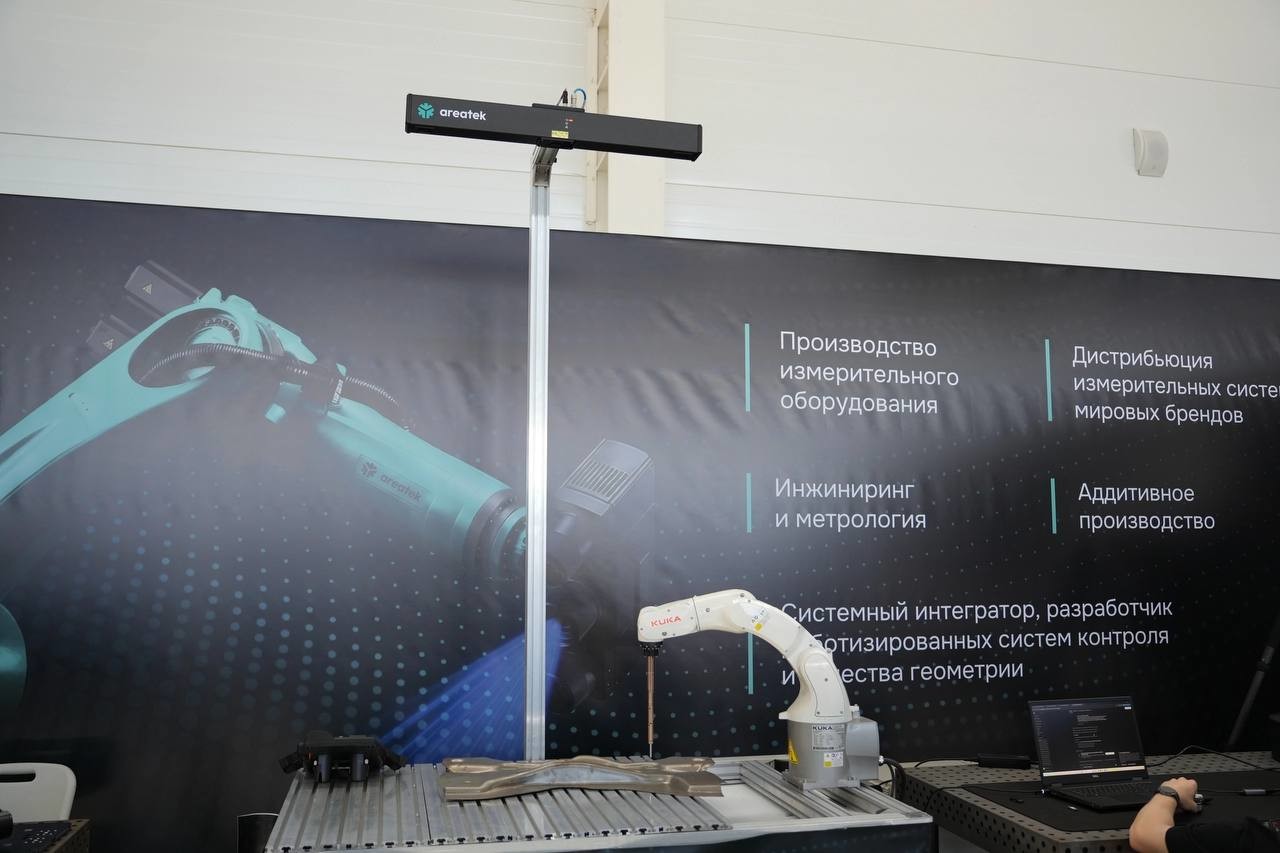
Система управления роботом на основе 3D‑облака точек.
Система управления роботом на основе 3D‑облака точек.
RP Laser Sensor XL от Areatek — система управления роботом на основе 3D‑облака точек для решения задач идентификации, контроля качества и точного позиционирования объектов. Areatek RP Laser Sensor XL помогает роботам точно определять форму, положение и ориентацию объектов в 3D-пространстве. Решение используется для автоматизации производственных линий, складов и логистических процессов.
Основные задачи:
Захват деталей из контейнеров
Робот определяет хаотично расположенные детали в ящике, выбирает объект для захвата и строит безопасную траекторию движения.
Разборка паллет
Система распознает коробки на паллете и помогает автоматически разгружать как однотипные, так и смешанные грузы.
Укладка на паллеты
Решение помогает формировать паллеты из разных товаров с учетом их формы, размеров и расположения.
Сортировка объектов по заданным параметрам
Система распознает тип, форму и размеры объектов и автоматически распределяет их по категориям: например, по типоразмеру, браку или номенклатуре на производственной линии или складе.
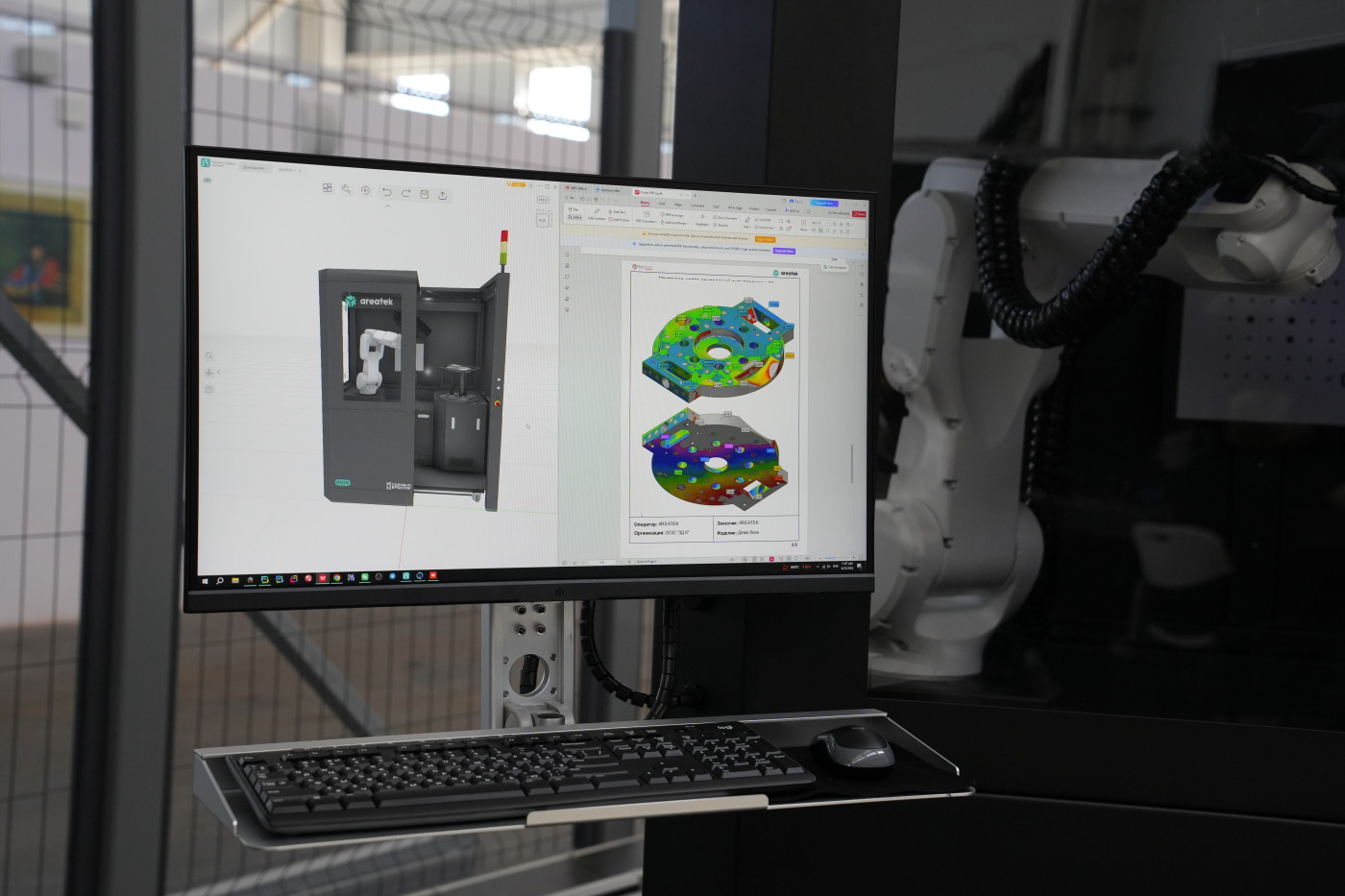
Контроль качества
3D-сканирование позволяет проверять геометрию изделий, размеры и наличие дефектов.
Захват и перемещение объектов
RP Laser Sensor XL помогает роботам находить, захватывать и перемещать объекты сложной формы, включая изделия с нестандартной поверхностью.
Система может применяться с промышленными роботами ABB, KUKA, FANUC, Universal Robots и другими.
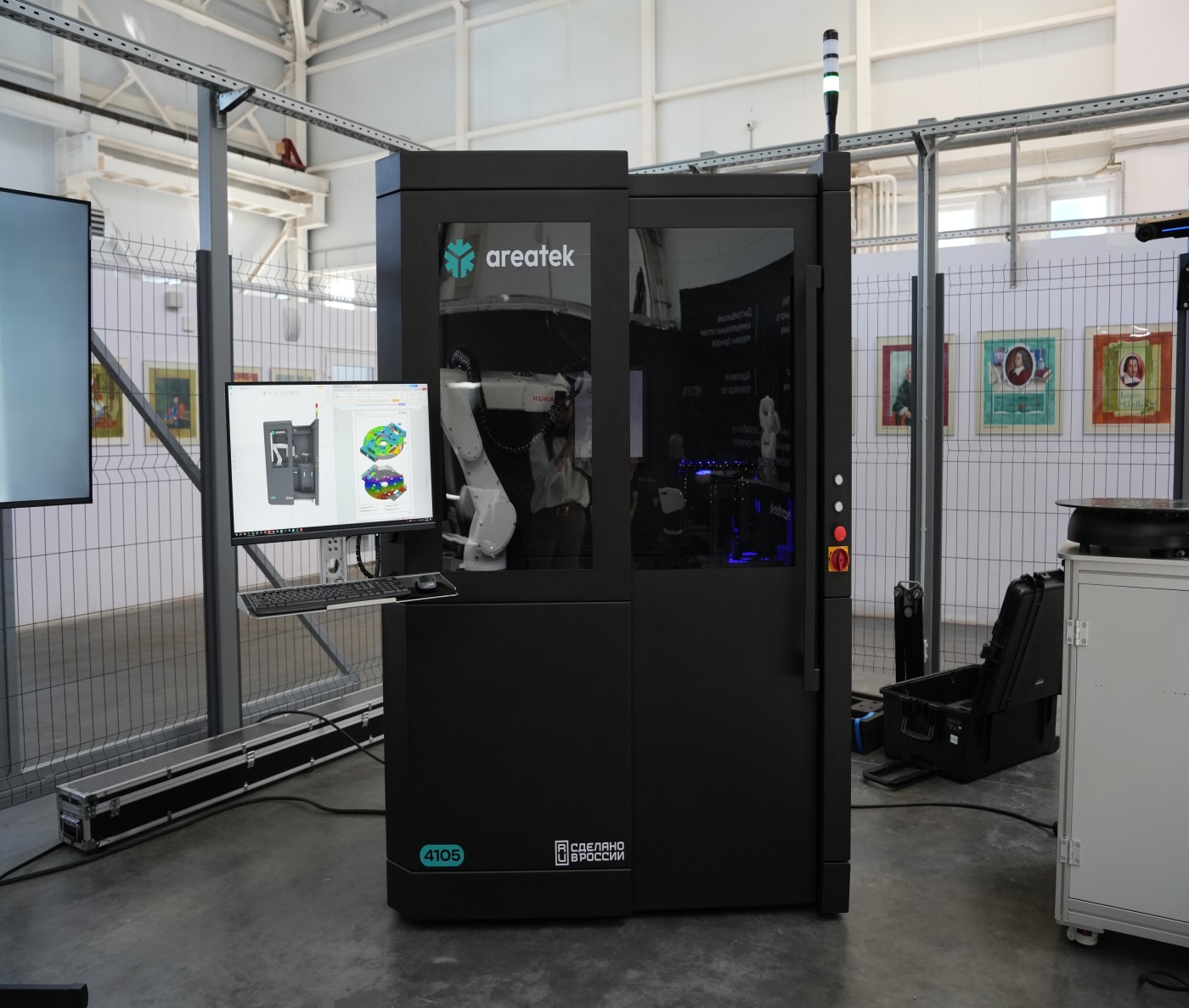
Комплектация
- Система технического зрения RP Laser Sensor XL от Areatek
- Набор кабелей для подключения
- Высокопроизводительный ПК
- Программное обеспечение
- Промышленный контроллер
Предлагаем купить систему RP Laser Sensor XL от Areatek
На сайте вы можете запросить презентацию нужного вам оборудования и заказать поставку в свой регион. Специалисты нашей компании проконсультируют вас по вопросам приобретения RP Laser Sensor XL от Areatek и другого 3d-оборудования.
Для получения бесплатной консультации свяжитесь с менеджером нашей компании через форму на сайте, почту info@3dcontrol.ru или позвоните по номеру 8 800 201 55 75. Мы предлагаем оптимальные решения для конкретных задач и отраслей промышленности.
Сценарии применения
Автоматическая укладка штампованных деталей на стеллажи в конце линии
Автоматическое перемещение компонентов
Контроль позиционирования, ориентации деталей и отсутствия повреждений при автоматической укладке
Автоматическое стеллажирование штампованных деталей
Автоматическая передача деталей на участок
Принцип работы
Захват 3D-облака точек:
Проецирование кодированного структурированного освещения на поверхность объекта и получение данных о координатах и глубине методом алгоритмической обработки.
Принцип позиционирования:
Выполняется вращение и трансляция облака точек относительно шаблонного облака точек для обеспечения максимального совмещения соответствующих характерных элементов.
Планирование траектории: Автоматическое вычисление оптимальной траектории движения робота от начальной точки до целевой с учётом препятствий и ограничений.
Характеристики Areatek RP Laser Sensor XL
| Параметр | RP-XL | RP-L | RP-S |
|---|---|---|---|
| Дистанция работы | 1500–3500 мм | 1100–2700 мм | 500–1100 мм |
| Поле зрения | 1340×1260 – 2910×3390 мм | 1180×930 – 2250×2880 мм | 540×430 – 1180×930 мм |
| Точность повторяемости сенсора | ±0,2 мм @ 3000 мм | ±0,1 мм @ 1600 мм | ±0,1 мм @ 800 мм |
| Погрешность измерения системы | ±1 мм @ 3000 мм | ±0,5 мм @ 1600 мм | ±0,5 мм @ 800 мм |
| Время захвата облака точек (типовое) | ≤1,1 сек | ≤1,1 сек | ≤1,1 сек |
| Время цикла | 2 сек | 2 сек | 2 сек |
| Разрешение камеры | 5 Мп | 3,2 Мп | 3,2 Мп |
| Габариты | 896 × 111 × 86 мм | 546 × 98 × 86 мм | 296 × 98 × 86 мм |
| Масса сенсора | 2,8 кг | 2,0 кг | 1,8 кг |
| Рабочая температура | 0–45 °C | 0–45 °C | 0–45 °C |
| Степень защиты IP | IP65 | IP65 | IP65 |
Наш менеджер свяжется с Вами в ближайшее время. Получить консультацию
Сайт использует в своей работе cookie-файлы, «Яндекс.Метрика» и «AppMetrica». Если, прочитав это сообщение, вы остаетесь на сайте, это означает, что вы согласны на применение данных технологий.