Калуга
Измерительная рука ROMER Absolute Arm SE с навесным 3D сканером HP-L-20.8





{kind=link}
{kind=link}
{kind=link}
Стоимость
По запросу
Запросить предложение
Заказать бесплатную демонстрацию
 Официальные дилеры
Официальные дилеры Собственная сервисная служба
Собственная сервисная служба Поставки по России и СНГ
Поставки по России и СНГ
ROMER Absolute Arm с внешним сканером является модульной сканерной платформой высокого класса, предназначенной для работы с лазерным сканером Hexagon Manufacturing Intelligence HP-L-20.8. В комплекте с HP-L-20.8, манипулятор ROMER Absolute Arm демонстрирует первоклассную работоспособность даже на самых сложных типах поверхностей.
ROMER Absolute Arm с внешним сканером является модульной сканерной платформой высокого класса, предназначенной для работы с лазерным сканером Hexagon Manufacturing Intelligence HP-L-20.8. В комплекте с HP-L-20.8, манипулятор ROMER Absolute Arm демонстрирует первоклассную работоспособность даже на самых сложных типах поверхностей.
Измерительная рука ROMER Absolute Arm SE с навесным 3D сканером HP-L-20.8
Модель снята с производства. Новая серия - измерительные руки Hexagon.
Благодаря уникальной технологии «летающей точки» HP-L-20.8, ширина линии сканирования и плотность точек могут регулироваться, что позволяет гарантировать максимальную детализацию сканирования там, где это больше всего необходимо. Увеличение производительности во всех отраслях промышленности.
ROMER Absolute Arm со сканером HP-L-20.8 демонстрирует первоклассные показатели даже на комплексных поверхностях с неоднородными свойствами, а также при сканировании предметов, изготовленных из материалов, которые обычно вызывают сложности при сканировании. Нет необходимости подстраивать сканер под разные типы поверхностей — система автоматического контроля мощности лазера HP-L-20.8 адаптируется самостоятельно. HP-L-20.8 — это первый в мире сканер с функцией zoom с возможностью выбора одной из трёх установок ширины линии лазера.
Все выпускаемые модели ROMER Absolute Arm имеют три уровня точности, что дает возможность правильно выбрать измерительный манипулятор, удовлетворяющий требованиям применения и бюджету. Манипуляторы серии 73 и 75 предлагают превосходное соотношение цена/производительность для повседневных метрологических задач, в то время как прибор 77 Series – наиболее точный манипулятор ROMER Absolute Arm из производимых когда-либо – идеально подходит для специальных или эксклюзивных метрологических приложений.
В отличие от многих метрологических приборов, ROMER Absolute Arm не требует времени для прогрева или инициализации благодаря стабильности конструкции из углепластиковых элементов и применению лучших промышленных абсолютных датчиков. Достаточно просто установить измерительную руку у детали, включить и начать измерения.
Применение измерительной руки
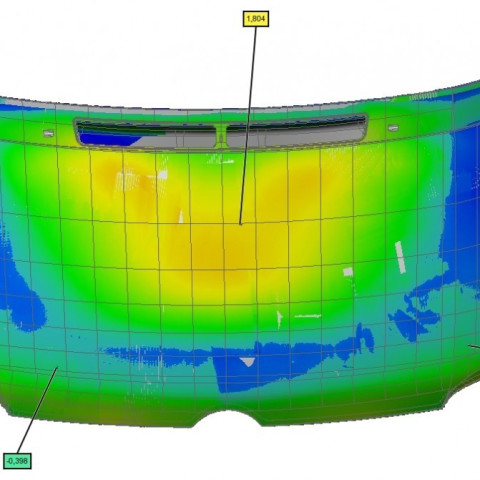
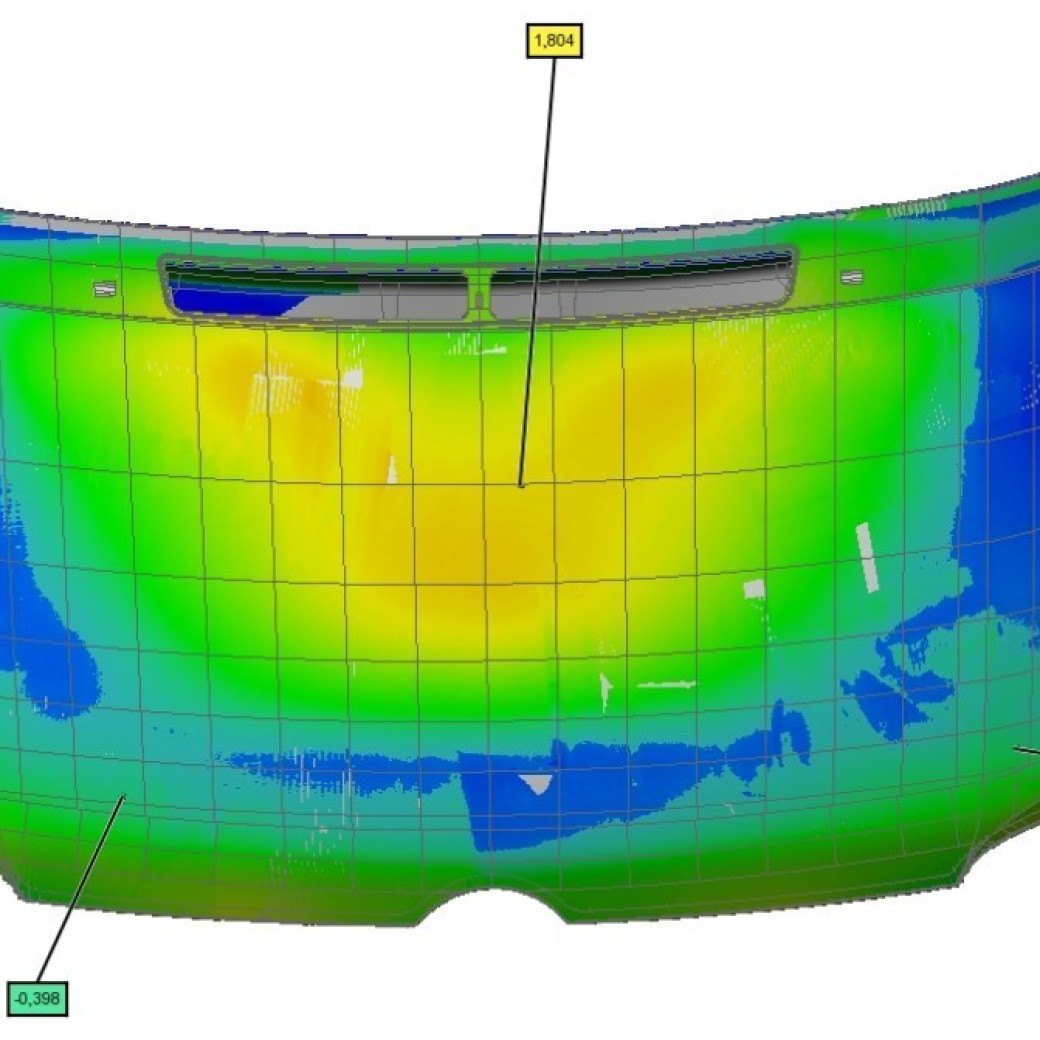
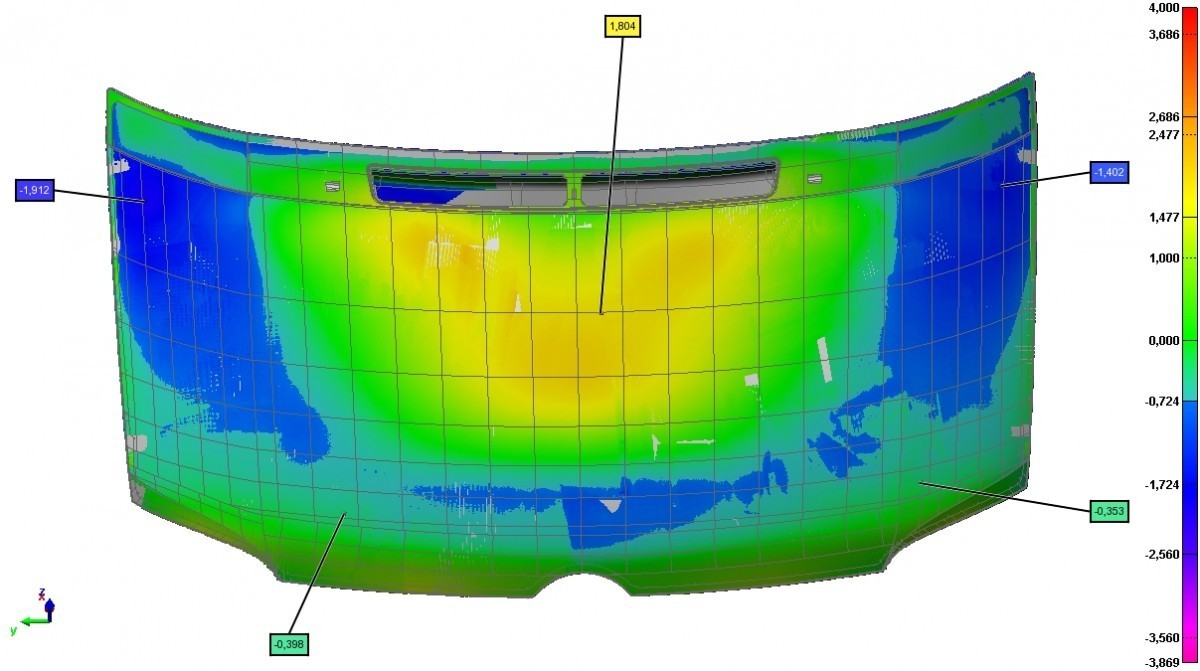
Кейс от компании 3Д К (см. фото выше) - 3D сканирование капота автомобиля. Анализ отклонений и контроль геометрии автомобильного капота путем 3D сканирования измерительной рукой Romer Absolute Arm 7545 SE со встроенным лазерным 3D сканером HP-L-20.8
Предлагаем купить измерительную руку ROMER Absolute Arm SE с навесным 3D сканером HP-L-20.8
На сайте 3D Control вы можете проконсультироваться с менеджером, запросить презентацию нужного вам 3д оборудования и заказать поставку в свой регион.
Свяжитесь с менеджером компании через форму на сайте, почту info@3dcontrol.ru или позвоните по номеру 8 (800) 201-55-75. Мы предложим оптимальные решения для конкретных задач и отраслей промышленности.
Ключевые особенности измерительной руки ROMER Absolute Arm SE с навесным 3D сканером HP-L-20.8
- Рабочая температура: от 0˚С до +50˚C
- RDS - В собственном программном обеспечении RDS используется технология SMART, позволяющая выполнять полевые проверки системы контроллировать температуру и ударные нагрузки.
- Лазерное сканирование - Измерительная рука ROMER Absolute Arm доступна с полностью интегрированным высококлассным лазерным сканером или внешним 3д сканером, для решения самых сложных задач по сканированию. ROMER Absolute Arms единственная сканирующая система на рынке, точность которой полностью сертифицирована.
- Стабильность и автоматическое распознование щупов - «Интеллектуальные» быстросменные щупы-смена контактных щупов в любое время без необходимости повторной калибровки. Специальный разъем щупов ROMER Absolute Arm позволяет производить их смену прямо во время измерений.
- Моментальная обратная связь - ROMER Absolute Arm обеспечивает моментальную акустическую и тактильную обратную связь с оператором, позволяющую использовать ROMER Absolute Arm в самых тяжелых промышленных условиях
- Абсолютные энкодеры - Инициализация энкодеров при запуске руки – это уже вчерашний день. Просто включите прибор и начните измерения.
- Измерительный объём - Рука Romer Absolute Arm доступна в семи версиях с разной длиной от 1.2 до 4.5 м с возможностью перебазировки, переустанова
- Сертификация - Все манипуляторы ROMER Absolute Arm, включая системы сканирования, проходят сертификацию B89.4.22. Также возможна дополнительная сертификация согласно стандартам VDI/VDE 2617-9. Модель ROMER Absolute Arm Compact сертифицируется на выбор по ISO 10360-2 или B89.4.22.
- Zero G - Противовес Zero G минимизирует момент,действующий на основание руки. Это позволяет использовать различные варианты установки,предоставляя полный контроль над инструментом.
- SmartLock - Если рука Romer Absolute Arm не используется, она может быть безопасно зафиксирована в нерабочем положении. SmartLock также позволяет фиксировать руку в любом промежуточном положении.
- Модули расширения Feature Pack - Благодаря модульной системе Feature Pack, функциональность абсолютной руки Romer может быть легко расширена. Модули расширения Feature Pack позволяют использовать функцию передачи данных (включая данные сканирования) по WiFi, работать полностью автономно от встроенного аккумулятора.
- Разработана для работы с высококлассным сканером HexagonMetrology HP-L-20.8, а также для работы с различными другими внешними сканерами
- Тщательно продуманный дизайн — никаких внешних кабелей
- Разъём TESA — лёгкость замены, калибровка только один раз
- Открытая платформа для других сканеров — благодаря разъёму TESA и технологии Feature Pack
Навесной лазерный 3D сканер HP-L-20.8
Спроектированный для измерительных манипуляторов ROMER Absolute Arm, сканер HP-L-20.8 с высочайшей производительностью производит обработку сложных деталей, изготовленных из самых сложных материалов. Имеющий регулируемую длину линии величиной до 220 мм и скорость сбора данных до 150000 точек в секунду, этот универсальный лазерный сканер позволяет получать трехмерные облака точек с высокой точностью и большой скоростью.
Совместная работа руки ROMER и лазерного трекера Leica
Мобильная система на базе измерительной руки ROMER и лазерного трекера Leica для проведения высокоточных измерений на сверх больших объектах в единой системе координат. Позиционирование руки в пространстве и привязка к системе координат объекта осуществляется с помощью трекера.
- Высокая точность в сверх-широком пространственном объеме.
- Измерение труднодоступных деталей, не находящихся в прямой видимости трекера.
- Линейный размер рабочей зоны трекера: 160 м.
- Возможность использовать оба прибора для решения измерительных задач как совместно, так и по отдельности.
Технические характеристики измерительной руки ROMER Absolute Arm SE с навесным 3D сканером HP-L-20.8
| 73 серия | Модель | Рабочая зона | Повторяемость1 | Пространственная точность2 | Точность сканирования3 | Bec |
| 7320 SE | 2.0 м | ± 0.044 мм | ± 0.061 мм | ± 0.075 мм | 7.9 кг | |
| 7325 SE | 2.5 м | ± 0.049 мм | ± 0.069 мм | ± 0.080 мм | 8.2 кг | |
| 7330 SE | 3.0 м | ± 0.079 мм | ± 0.100 мм | ± 0.113 мм | 8.5 кг | |
| 7335 SE | 3.5 м | ± 0.099 мм | ± 0.125 мм | ± 0.140 мм | 8.8 кг | |
| 7340 SE | 4.0 м | ± 0.115 мм | ± 0.151 мм | ± 0.172 мм | 9.1 кг | |
| 7345 SE | 4.5 м | ± 0.141 мм | ± 0.179 мм | ± 0.203 мм | 9.4 кг |
| 75 серия | Модель | Рабочая зона | Повторяемость1 | Пространственная точность2 | Точность сканирования3 | Bec |
| 7520 SE | 2.0 м | ± 0.023 мм | ± 0.033 мм | ± 0.053 мм | 8.2 кг | |
| 7525 SE | 2.5 м | ± 0.027 мм | ± 0.038 мм | ± 0.058 мм | 8.5 кг | |
| 7530 SE | 3.0 м | ± 0.042 мм | ± 0.058 мм | ± 0.078 мм | 8.8 кг | |
| 7535 SE | 3.5 м | ± 0.055 мм | ± 0.081 мм | ± 0.096 мм | 9.1 кг | |
| 7540 SE | 4.0 м | ± 0.067 мм | ± 0.098 мм | ± 0.114 мм | 9.4 кг | |
| 7545 SE | 4.5 м | ± 0.084 мм | ± 0.119 мм | ± 0.133 мм | 9.7 кг |
| 77 серия | Модель | Рабочая зона | Повторяемость1 | Пространственная точность2 | Точность сканирования3 | Bec |
| 7725 SE | 2.5 м | ± 0.023 мм | ± 0.034 мм | ± 0.046 мм | 8.5 кг | |
| 7730 SE | 3.0 м | ± 0.036 мм | ± 0.052 мм | ± 0.062 мм | 8.8 кг | |
| 7735 SE | 3.5 м | ± 0.047 мм | ± 0.073 мм | ± 0.077 мм | 9.1 кг | |
| 7740 SE | 4.0 м | ± 0.057 мм | ± 0.088 мм | ± 0.091 мм | 9.4 кг | |
| 7745 SE | 4.5 м | ± 0.071 мм | ± 0.107 мм | ± 0.106 мм | 9.7 кг |
1 - тест на повторяемость определяет повторяемость измерений руки с использованием сферического щупа. Эталонные меры устанавливается перед машиной. Точки на поверхности берутся несколькими подходами с разных направлений. Затем рассчитывается среднее значение и отклонение. Результат теста - максимальный диапазон измерений разделенный на два.
2 - тест на объёмную точность наиболее точно отображает действительную точность инструмента в реальных условиях, так как включает в себя многократное измерение сертифицированого эталона длины с разных позиций и при разной ориентации, после чего производится сравнение с фактическим значением длины. Исследование на пространственную точность измерения длины наиболее точно отражает реальную точность и повторяемость инструмента. Результатом является максимальное отклонение измеренного расстояния от теоретического.
3 - тест на точность сканирующей системы HP-L-20.8 наиболее точно отображает точность инструмента в режиме сканирования в реальных условиях. Тест включает в себя сканирование матовой сферы серого цвета при пяти различных положениях и ориентации руки. В каждом положении руки сфера сканируется таким образом, чтобы была покрыта практически вся поверхность сферы. Результатом является максимальное расстояние между центрами пяти вычисленных сфер.
Наш менеджер свяжется с Вами в ближайшее время. Получить консультацию
Сайт использует в своей работе cookie-файлы, «Яндекс.Метрика» и «AppMetrica». Если, прочитав это сообщение, вы остаетесь на сайте, это означает, что вы согласны на применение данных технологий.